
Deep Learning code 구현을 위한 Q&A
딥러닝 공부 18일차(+20일차)
그 동안 딥러닝 공부를 하면서 들었던 의문점들을 총 집합해서 공부하고 알아보겠습니다.
제가 들었던 의문이면 다른 사람들도 똑같이 의문을 가지지 않았을까 싶어 따로 정리해보려합니다.
도움이 되었으면 좋겠습니다~
Parameter VS Hiperparameter
파라미터는 한국어로 매개변수입니다. 파라미터는 모델 내부에서 결정되는 변수입니다. 또한 그 값은 데이터로부터 결정됩니다.
하이퍼 파라미터는 모델링할 때 사용자가 직접 세팅해주는 값을 뜻합니다. learning rate나 서포트 벡터 머신에서의 C, sigma 값, KNN에서의 K값 등등 굉장히 많습니다. 머신러닝 모델을 쓸 때 사용자가 직접 세팅해야 하는 값은 상당히 많습니다.
그 모든 게 다 하이퍼 파라미터입니다. 하지만, 많은 사람들이 그런 값들을 조정할 때 그냥 ‘모델의 파라미터를 조정한다’라는 표현을 씁니다. 원칙적으로는 ‘모델의 하이퍼 파라미터를 조정한다’라고 해야 합니다.
파라미터와 하이퍼 파라미터를 구분하는 기준은 사용자가 직접 설정하느냐 아니냐입니다. 사용자가 직접 설정하면 하이퍼 파라미터, 모델 혹은 데이터에 의해 결정되면 파라미터입니다.
torch.nn.init
torch.nn.init에는 텐서에 초기값을 주기 위해 필요한 함수들이 저장되어 있다.
torch.nn.init.uniform_(tensor)
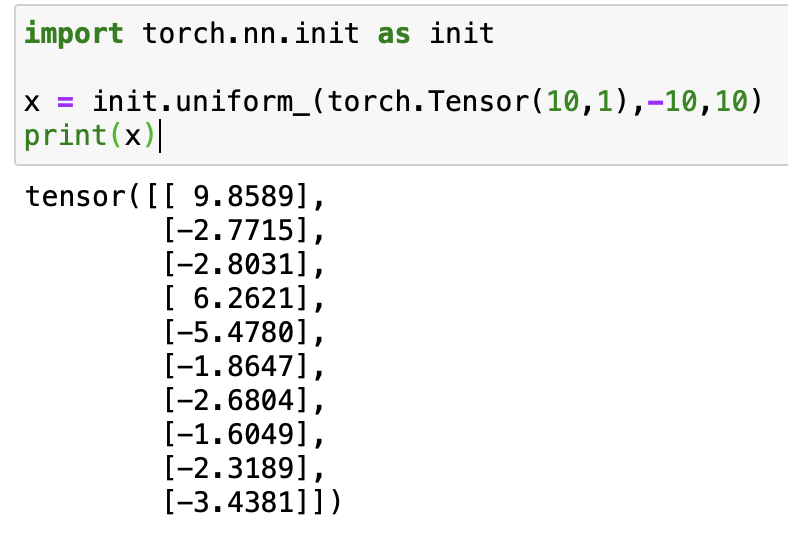
x 에 10행 1열 짜리 텐서를 선언해주고, -10 부터 10까지 uniform함수로 행렬의 원소를 무작위로 선언해주는 함수이다.
torch.nn.init.normal_(tensor)
normal은 정규분포를 의미하며, 앞의 unifrom 함수와 비슷합니다.
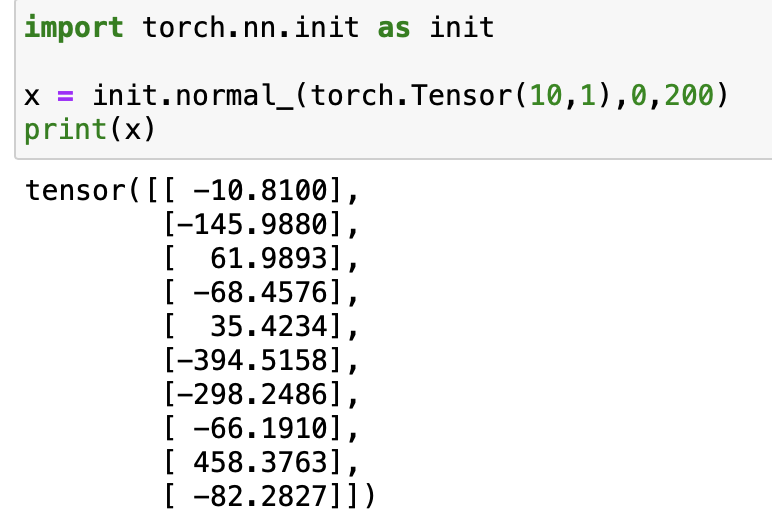
평균이 0이고, 표준편차가 200(보통은1로 많이 합니다.)으로 설정해보고 출력해보았습니다.
torch.nn,init.ones_(tensor)
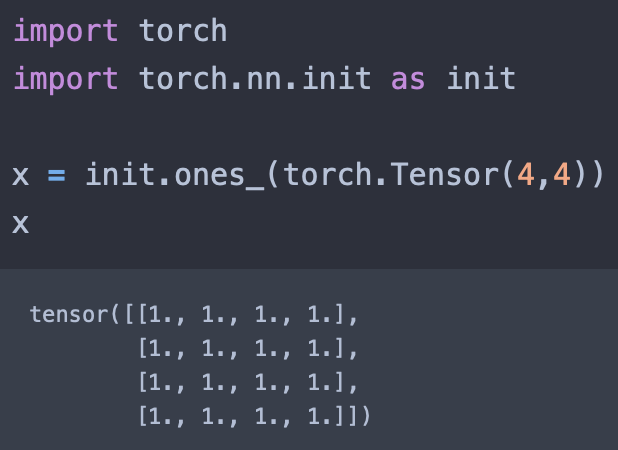
tensor manipulation 에서 배웠듯이 행렬의 원소들을 1로 채워주는 함수입니다.
torch.nn.init.zeros_(tensor)
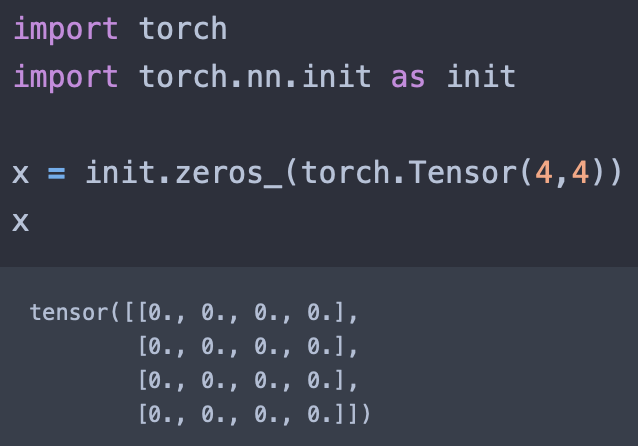
마찬가지로 행렬의 원소들을 0으로 만들어줍니다.
torch.nn.init.eye_(tensor)
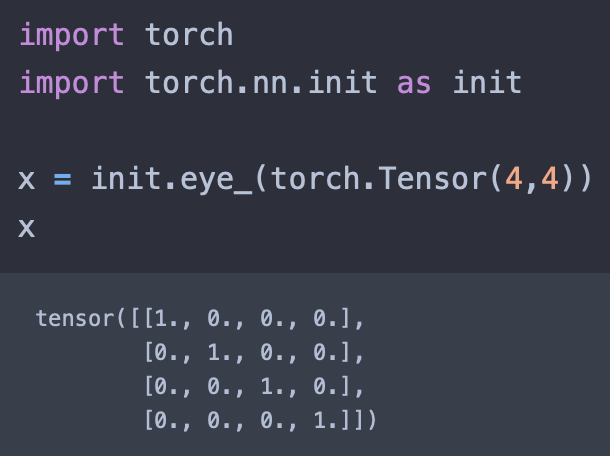
행렬의 대각성분을 1로 만드는 함수입니다.
정방행렬이 아닐경우에는, 그냥 0으로 비워집니다.
Conv1d, 2d, 3d 차이
말 그대로입니다. 1차원 배열 데이터에는 Conv1D를, 2차원 배열 데이터에는 Conv2D를 사용한다. 3차원 배열이면 Conv3D를 사용합니다.
즉, Conv1D, Conv2D, Conv3D 차이는 입력 데이터의 차원이다. 그런데 여기서 끝나면 아쉬우니 코드로 더 살펴봅시다.
필자는 아직 파이토치밖에 공부를 안했는데 찾아본 예시 코드가 텐서플로우입니다… 하지만 이해는 할 수 있으니 갖다 써보겠습니다.
model = tf.keras.models.Sequential([
# Note the input shape is the desired size of the image 150x150 with 3 bytes color
tf.keras.layers.Conv2D(64, (3,3), activation='relu', input_shape=(150, 150, 3)),
tf.keras.layers.MaxPooling2D(2, 2),
tf.keras.layers.Conv2D(128, (3,3), activation='relu'),
tf.keras.layers.MaxPooling2D(2,2),
tf.keras.layers.Flatten(),
tf.keras.layers.Dense(512, activation='relu'),
tf.keras.layers.Dense(3, activation='softmax')
])
위 코드를 보면 입력 차원(input_shape)이 3차원인데 왜 Conv2D지? 라는 의문이 생길 수 있습니다, 또
model = tf.keras.Sequential([
tf.keras.layers.Embedding(tokenizer.vocab_size, 64),
tf.keras.layers.Conv1D(128, 5, activation='relu'),
tf.keras.layers.GlobalAveragePooling1D(),
tf.keras.layers.Dense(64, activation='relu'),
tf.keras.layers.Dense(1, activation='sigmoid')
])
2번째 줄이랑 3번째 줄만 보명. 입력 차원이 (tokenizer.vocab_size, 64)로 2차원인데 Conv1D를 쓰지….? 라는 의문이 듭니다.
그래서 궁극적으로 Conv(n)d 의 차이점은 합성곱을 진행할 입력 데이터의 차원 을 의미합니다.
합성곱 진행 방향을 고려해야 한다는 말입니다.
입력의 형태, 출력의 크기
Convolution의 입력 타입은 Torch.tensor이며 형태는 다음과 같습니다.
\[input shape : (N \times C \times H \times W)\]\((batch \text{-} size, channel, height, width)\)
이로 인한 출력의 크기는 다음 수식을 통해 구할 수 있다.
\(Output size = \frac{입력사이즈-필터사이즈+2\times패딩사이즈}{스트라이드}+1\)
Conv2d
conv1d 와 3d는 필요할 때 더 자세히 알아보겠습니다.
torch.nn.Conv2d(입력채널 수, 출력채널 수, 커널사이즈, 스트라이드, 패딩) 순으로 입력한다고만 알면 거의 막힐일이 없을 것 같습니다.
정사각커널 and 상하좌우로 같은 크기만큼 움직이는 패딩
m = nn.Conv2d(16, 33, 3, stride=2)
한글로 표현하려니 빡세서 아래는 영어로 쓰겠습니다.
non-square kernels and unequal stride and with padding
m = nn.Conv2d(16, 33, (3, 5), stride=(2, 1), padding=(4, 2))
non-square kernels and unequal stride and with padding and dilation
m = nn.Conv2d(16, 33, (3, 5), stride=(2, 1), padding=(4, 2), dilation=(3, 1))
Dilation
dilation 이란 kernel의 한 픽셀에서 다른 픽셀까지의 거리를 띄우고 싶을 때 쓰는 변수입니다.
위의 gif를 통해 빠르게 이해가 가능하실겁니다. 위의 움짤의 경우 dilation = (4,2) 로 선언을 하였습니다.
여기서 괄호안의 값의 의미는 (height, width) 즉, 높이가 4만큼 너비가 2만큼 커널끼리 띄어져 있어야한다는 의미입니다.
참고로 위 움짤의 참고사항을 적어보면
- input shape : (9, 9, 2)
- output shape : (5, 9, 1)
- kernel size : (3, 3)
- stride : (1, 1)
- padding : (2, 2)
댓글남기기